Product
Features
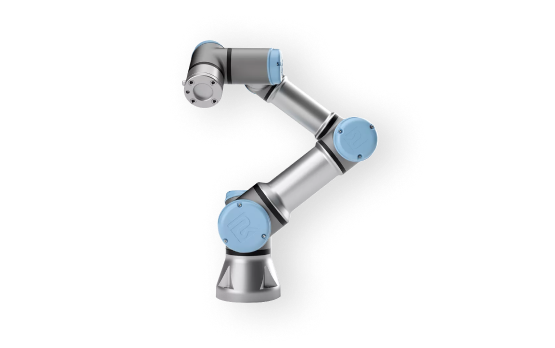
- Flexibility Non-restrictive arrangement and work automation by making use of intuitive 3D interface featured in 65 patents
- Improving productivity High productivity and ROI realized by simple programming and fast installation
- Global Coverage Installed and operational in 50 countries or so thanks to technology converging human and robot
Specifications
가로로 스와이프하여
내용을 확인해주세요.
| Payload |
3 kg (6.6 lbs) |
|---|---|
|
Radius |
500 mm (19.7 in) |
|
Degree of freedom |
6 rotating joints |
|
Pose repeatability |
± 0.03 mm (ISO 9283 기준) |
|
Installation area |
⌀ 128 mm |
|
Power consumption |
General 100W, Max. 300W |
| Programming |
12-inch touchscreen including a polyscope graphic user interface |
|
Standard TCP speed |
1 m/s (39.4 in/s) |
|
IP rating |
IP 44 |
|
ISO 14644-1 cleanroom classification |
6 |
|
Force sensor, tool flange (force, x-y-z) |
30.0N / 2.0N / 3.5N (Range / Resolution / Precision) |
|
Force sensor, tool flange (torque, x-y-z) |
10Nm / 0.1 Nm / 0.1 Nm (Range / Resolution / Precision) |
|
Axis movement range |
± 360° (base, shoulder, elbow, wrist 1, wrist 2) , infinite (wrist 3) |
|
Maximum axis speed |
± 180°/s (base, shoulder, elbow) , ± 360°/s (wrist 1, wrist 2, wrist 3) |
Option

HAND-E Adaptive Gripper

2F-85 Gripper

EPICK Vacuum Gripper

AIRPICK Vacuum Gripper

Wrist Camera

300-S Force Torque Sensor
Refusal to collect e-mail addresses without permission

The Company refuses the automatic collection of e-mail addresses posted on the homepage,
and any violation will be punished pursuant to the Act on the Promotion of Information and Communication Network Utilization and Information Protection, Etc.
All of the contents posted on the homepage of SAMICK THK are protected pursuant to the Copyright Act.
Subscribe to SAMICK Insights
*Required data
- Consent to
providing personal
information* -
- 1. Personal data items to be collected
- SAMICK THK (hereinafter "Company") processes the personal data items listed below:
- - Required data: Company, division, name, e-mail address
- 2. Purpose of collection and use
- Sending newsletters, management of subscription applicants
- 3. Entrustment of handling and processing of personal information
- The Company carries out the handling and processing of personal information by entrusting jobs to the following assignee for the purpose of providing customers with better services and facilitating the jobs:
Assignee: Welcome Associate Scope of entrusted jobs: Transmitting newsletters Entrustment period: Until the purposes of collection and use of personal information are achieved, or application for release of newsletter- 4. Period of preservation of personal information
- Your personal information will be destroyed without delay once the Company receives a notice of rejection of receipt of newsletter. Should the applicable laws and regulations stipulate preservation otherwise, the Company may not destroy but preserve personal information whose period of preservation and use has expired.
Note: You may withhold consent to the collection and use of your personal information, in which case the newsletter will not be sent to you.
to SAMICK lnsights is complete.
The Company will inform you of various news on SAMICK THK.